 [平装]")
内容简介
《人工智能:一种现代方法(第2版)》既详细介绍了大量的基本概念、思想和算法,也描述了各研究方向最前沿的进展,同时收集整理了详实的历史文献与事件。因此《人工智能:一种现代方法(第2版)》适合于不同层次和领域的研究人员及学生,可以作为信息领域和相关领域的高等院校本科生和研究生的教材或教学辅导书目,也可以作为相关领域的科研与工程技术人员的参考书。
编辑推荐
《人工智能:一种现代方法(第2版)》还得到了一套联机资源的支撑,包括源代码、图表、讲义幻灯片、一个包含超过800条到网站“Al on the Web”的链接的目录,以及一个联机讨论组。
媒体推荐
“此教科书的出版是向前迈进的重要一步。不仅对于AI的教学而言,也在于本书所介绍的关于人工智能领域的统一化观点。即使是本领域的专家。在每一章中也能发现重要的见解。”
——Thomas Dietterich教授(俄勒冈州立大学)
“真是了不起。本书是我一直期待的……今后10年中AI领域的圣经。”
——Gerd Brewka教授《维也纳大学)
“不可思议的成就。一本实在完美的书!”
——SeImer Bringsjord教授(RPI)
“这是一本伟大的书,有着难以置信的广度和深度,而且写得非常好。我认识的每个在他们的课堂上使用本书的人都爱上了它。”
——Haym Hirsh教授(Rutgers大学)
“它所表现出的关于AI领域的一幅连贯的、平衡的、宽广和深入的、令人欣喜的图景,以空前的品质深深地打动了我。它将成为以后几年中的标准教材。”
——Wolfgang Bibel教授(Darmstadt大学)
“了不起!写得漂亮,组织得也好。全面涵盖了每个学AI的学生应该了解的材料。”
——Martha Pollack教授(密执根大学)
“出色……它的描述极为清晰和易读;它的组织结构很优秀;它的例子能激发人的思考;而且它的覆盖面是精深的和周到的!……在一段时间内将理所当然地统驭本领域。”
——尼尔斯·尼尔森教授(斯坦福大学)
“现在能得到的最好的书籍……它几乎与Chamiak和我写的那本书一样好。但是更新。(好吧,我承认,它也许甚至比我们的书更好。”)
——Drew McDermott教授(耶鲁大学)
“一部关于整个人工智能领域的权威性记录,将对教授和学生都有启迪作用。”
——Alan Kay博士
“正是本书使我热爱AI。”
——学生(印度尼西亚)
作者简介
作者:(美国)斯图尔特·罗素(Stuart Russell) (美国)诺文(Peter Norvig) 译者:姜哲 金奕江 张敏 等
斯图尔特·罗素(Stuart Russell),1962年生于英国朴次茅斯(Portsmouth)。他于1982年以优异成绩在牛津大学获得物理学硕士学位,并于1986年在斯坦福大学获得计算机科学的博士学位。之后他加入加州大学伯克利分校,任计算机科学系教授、智能系统中心主任,他是Smith-Zadeh工程学讲座教授(Smith-Zadeh Chak of Engineering)头衔的持有者。1990年他获得国家科学基金的“总统青年研究者”(Presidential Young Investigator)奖,1995年他是“计算机与思维”(Computer and Thought)奖的获得者之一。他是加州大学1996年的一名Miller教授(Miller Professor),并于2000年被指定为首席讲座教授(Chancellor’s Professorship)。1998年他在斯坦福大学做过Forsythe纪念演讲(Forsythe Memorial Lecture)。他是美国人工智能学会的成员和前执行委员会委员。他已经发表过100多篇论文,内容涉及人工智能领域的广泛课题。他的其它著作包括《在类比与归纳中使用知识》(The Use of Knowledge in Analogy and Induction),以及(与Eric Wefald合著的)《做正确的事情:有限理性的研究》(DDt he Right Thing:Studiesin Limited Rationality)。彼得·诺维格(Peter Norvig),Google公司的搜索质量部门主管(director of Search Quality)。他是美国人工智能学会的成员和执行委员会委员。他曾经是NASA Ames研究中心计算科学部的主任,在那里他监督NASA在人工智能和机器人学领域的研究与开发。之前他作为Junglee的首席科学家帮助开发了最早的因特网信息抽取服务之一,并作为一名资深科学家在Sun微系统实验室从事智能信息检索的研究工作。他在布朗(Brown)大学获得应用数学硕士学位,并在加州大学伯克利分校获得计算机科学的博士学位。他曾任南加州大学的教授,并且是伯克利的研究职员。他有超过50部计算机科学领域的论著,包括著作《人工智能程序设计范例:通用Lisp语言的案例研究》(Paradigms of A IP rogramming:Case Studies in Common Lisp)、《Verbmobil:一个面对面对话的翻译系统》(Verbmobil:A Translation System for Face to-face Dialog),以及《UNIX的智能帮助系统》(Intelligent Help System for UNIX)。
目录
第1章 绪论
1.1 什么是人工智能
1.1.1 类人行为:图灵测试方法
1.1.2 类人思考:认知模型方法
1.1.3 理性地思考:“思维法则”方法
1.1.4 理性地行动:理性智能体方法
1.2 人工智能的基础
1.2.1 哲学(公元前428年-现在)
1.2.2 数学(约800年-现在)
1.2.3 经济学(1776年-现在)
1.2.4 神经科学(1861年-现在)
1.2.5 心理学(1879年-现在)
1.2.6 计算机工程(1940年-现在)
1.2.7 控制论(1948年-现在)
1.2.8 语言学(1957年-现在)
1.3 人工智能的历史
1.3.1 人工智能的孕育期(1943年-1955年)
1.3.2 人工智能的诞生(1956年)
1.3.3 早期的热情,巨大的期望(1952年-1969年)
1.3.4 现实的困难(1966年-1973年)
1.3.5 基于知识的系统:力量的钥匙?(1969年-1979年)
1.3.6 AI成为工业(1980年-现在)
1.3.7 神经元网络的回归(1986年-现在)
1.3.8 AI成为科学(1987年-现在)
1.3.9 智能化智能体的出现(1995年-现在)
1.4 目前发展水平
1.5 小结
参考文献与历史的注释
习题第2章 智能化智能体
2.1 智能体和环境
2.2 好的行为表现:理性的概念
2.2.1 性能度量
2.2.2 理性
2.2.3 全知者,学习和自主性
2.3 环境的本质
2.3.1 详细说明任务环境
2.3.2 任务环境的属性
2.4 智能体的结构
2.4.1 智能体程序
2.4.2 简单反射型智能体
2.4.3 基于模型的反射型智能体
2.4.4 基于目标的智能体
2.4.5 基于效用的智能体
2.4.6 学习智能体
2.5 小结
参考文献与历史的注释
习题
第二部分 问题求解
第3章 用搜索法对问题求解
3.1 问题求解智能体
3.1.1 定义明确的问题及解
3.1.2 把问题形式化
3.2 问题实例
3.2.1 玩具问题
3.2.2 现实世界问题
3.3 对解的搜索
3.4 无信息的搜索策略
3.4.1 广度优先搜索
3.4.2 代价一致搜索
3.4.3 深度优先搜索
3.4.4 深度有限搜索
3.4.5 迭代深入深度优先搜索
3.4.6 双向搜索
3.4.7 无信息搜索策略的比较
3.5 避免重复状态
3.6 使用不完全信息的搜索
3.6.1 无传感问题
3.6.2 偶发性问题
3.7 小结
参考文献与历史的注释
习题
第4章 有信息的搜索和探索
4.1 有信息的(启发式的)搜索策略
4.1.1 贪婪最佳优先搜索
4.1.2 A*搜索:最小化总的估计解耗散
4.1.3 存储限制的启发式搜索
4.1.4 为了更好地搜索而学习
4.2 启发函数
4.2.1 启发函数的精确度对性能的影响
4.2.2 设计可采纳的启发函数
4.2.3 从经验里学习启发函数
4.3 局部搜索算法和最优化问题
4.3.1 爬山法搜索
4.3.2 模拟退火搜索
4.3.3 局部剪枝搜索
4.3.4 遗传算法
4.4 连续空间的局部搜索
4.5 联机搜索智能体和未知环境
4.5.1 联机搜索问题
4.5.2 联机搜索智能体
4.5.3 联机局部搜索
4.5.4 联机搜索的学习
4.6 小结
参考文献与历史的注释
习题
第5章 约束满足问题
5.1 约束满足问题
5.2 CSP问题的回溯搜索
5.2.1 变量和取值顺序
5.2.2 通过约束传播信息
5.3 约束满足问题的局部搜索
5.4 问题的结构
5.5 小结
参考文献与历史的注释
习题
第6章 对抗搜索
6.1 博弈
6.2 博弈中的优化决策
6.2.1 最优策略
6.2.2 极小极大值算法
6.2.3 多人游戏中的最优决策
6.3 a-B剪枝
6.4 不完整的实时决策
6.4.1 评价函数
6.4.2 截断搜索
6.5 包含几率因素的游戏
6.5.1 有几率节点的游戏中的局面评价
6.5.2 期望极小极大值的复杂度
6.5.3 牌类游戏
6.6 博弈程序的当前发展水平
6.7 讨论
6.8 小结
参考文献与历史的注释
习题
第三部分 知识与推理
第7章 逻辑智能体
7.1 基于知识的智能体
7.2 wumpus世界
7.3 逻辑
7.4 命题逻辑:一种非常简单的逻辑
7.4.1 语法
7.4.2 语义
7.4.3 一个简单的知识库
7.4.4 推理
7.4.5 等价、合法性和可满足性
7.5 命题逻辑的推理模式
7.5.1 归结
……
第8章 一阶逻辑
第9章 一阶逻辑中的推理
第10章 知识表示
第四部分 规划
第11章 规划
第12章 现实世界的规划与行动
第五部分 不确定知识与推理
第13章 不确定性
第14章 概率推理
第15章 关于时间的概率推理
第16章 制定简单决策
第17章 制定复杂决策
第六部分 学习
第18章 从观察中学习
第19章 学习中的知识
第20章 统计学习方法
第21章 强化学习
第七部分 通讯、感知与行动
第22章 通讯
第23章 概率语言处理
第24章 感知
第25章 机器人学
第八部分 结论
第27章 人工智能:现状与未来
附录A 数学背景
附录B 关于语言和算法的注释
参考文献(见人民邮电出版社网站)
序言
本书的副标题是“一种现代方法”。这个相当空洞的短语希望表达的含义是,我们试图将我们现在所知道的内容综合到一个共同的框架中,而不是试图在各自的历史环境下解释人工智能的各个子领域。对于那些自己的研究领域因此没有得到足够重视的读者,我们表示歉意。
本书主要的统一主题是智能化智能体的思想。我们将人工智能定义为对从环境中接收感知信息并执行行动的智能体的研究。每个这样的智能体都实现了一个把感知序列映射到行动的函数。我们讨论了表达这些函数的各种不同方法,诸如产生式系统、反应式智能体、实时条件规划器、神经元网络,以及决策理论系统等。我们把学习所扮演的角色解释为把设计者能接触的范围扩展到未知环境中,并且我们说明了这个角色是如何约束智能体设计;形成明确的知识表示和推理的。我们并不把机器人学和视觉当作各自独立定义的问题对待,而是出现在为实现目标而服务的过程中。我们强调在确定合适的智能体设计的过程中任务环境的重要性。
我们的首要目标是要传达过去50年间的人工智能研究和过去2000年的相关工作中所涌现出来的思想。在表达这些思想的过程中,我们在保持精确的同时尽力避免过分的形式化。在任何适当的地方本书都加入了伪代码算法以使这些思想更具体。我们所使用的伪代码在附录B中有简要描述。这些算法的几种程序设计语言的具体实现可以从本书的网站获得。
文摘
插图:
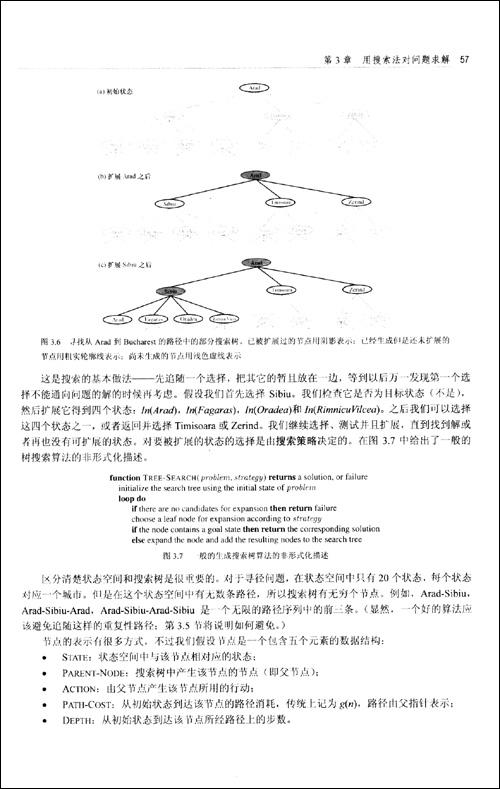
在投入细节讨论之前,让我们暂停一下,来看看问题求解智能体在第二章关于智能体和环境的讨论中所处的适合位置。在图3.1中,智能体设计假定环境是静态的,因为完成问题形式化和求解的时候不再注意可能发生在环境中的任何变化。该智能体设计还假定初始状态是己知的;如果环境是可观察的,了解初始状态是最简单的。枚举“可选的行动过程”的思想假定环境是离散的。最后,也是最重要的,该智能体设计假定环境是确定性的。问题的解是行动的单一序列,所以它们不能处理任何意外事件;此外,在执行问题的解的过程中同样是不注意感知信息的!可以说,一个闭着眼睛执行计划的智能体必须对正在进行的事情十分有把握。(控制论中称此为开环系统,因为忽略感知信息打破了智能体和环境之间的环路。)所有这些假设意味着我们处理的是最简单的一种环境,这也是这一章出现在本书靠前位置的原因之一。
第3.6节将简要考察一下当我们放松可观察性和确定性的假设时会发生什么。第十二章和第十七章将更深入地进行讨论。
3.1.1定义明确的问题及解一个问题可以形式化地定义为四个组成部分:智能体起始时的初始状态。例如,在罗马尼亚问题中我们的智能体的初始状态可以描述为对智能体可采纳的可能行动的描述。最常见的形式化是使用一个后继函数。给定一个特殊状态组成的集合,其中每个行动都是状态下的合法行动之一,每个后继都是应用行动后从状态x能达到的状态。例如,从状态砌开始,罗马尼亚问题的后继函数将返回集合:总之,初始状态和它的后继函数隐含地定义了问题的状态空间——即从初始状态可以达到的所有状态的集合。状态空间形成一个图,其中节点是状态,节点之间的弧就是行动。(如果我们把每条道路视为代表着两个驾驶行动,每个行动各走一个方向,图3.2所示的罗马尼亚地图就可以被解释为一个状态空间图。)状态空间中的一条路径就是通过行动序列连接起来的一个状态序列。
更多阅读:
