自动驾驶存在单车智能自动驾驶(Autonomous Driving,AD)和车路协同自动驾驶(Vehicle-Infrastructure Cooperated Autonomous Driving,VICDA)两种技术路线。车路协同是单车智能的高级发展形式,能让自动驾驶行车更安全、行驶范围更广泛、落地更经济。
基于车路协同的预期功能(SOTIF)能提升自动驾驶安全。以往在极端天气、不利照明、物体遮挡等情况下,单车智能的感知、预测能力面临严峻挑战。而车路协同可弥补车端感知不足,有效扩大单车智能的安全范围。
车路协同能够扩展自动驾驶 ODD(车辆运行设计域)。一般而言,受天气、行驶区域、时段、速度等因素限制,单车智能能够感知和应对的驾驶场景有限。而路侧的协同感知能够扩展车辆的感知范围、能力和场景,从而扩展单车的运行设计域(ODD),进一步提升自动驾驶的点到点能力。
在系统配置上,单车智能除了要投入高昂传感器、算力设备之外,还需要一套等效的冗余子系统。而车路协同提供的路侧设备感知冗余,不仅复用率高避免重复建设,还能实现成本分摊。因此,在同等自动驾驶安全前提下,车路协同可以大范围实施部署,促进自动驾驶规模商业化的早日实现。
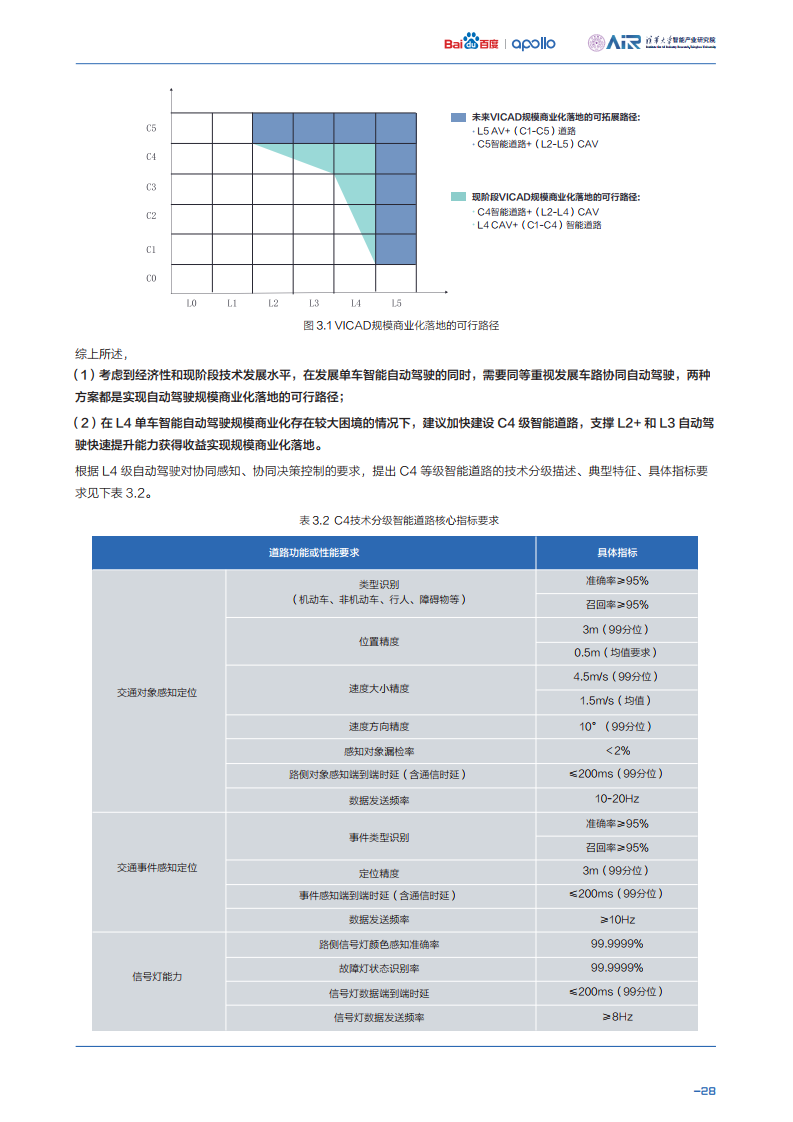
清华大学智能产业研究院与百度 Apollo 在白皮书中对国内道路现状进行了智能化分级,将道路智能化水平分为 C0-C5级6个等级。道路智能化等级越高,对车辆智能化要求也越低,覆盖的智能汽车等级范围也越广。
其中,C4级别道路值得我们一起特别关注。与更高级智能道路相比,C4级智能道路投入产出比更高,其覆盖的智能汽车等级范围从 L2+到 L5。也就是说,C4级智能道路不仅能为高级自动驾驶车辆提供协同服务,还能让 L2+、L3级辅助驾驶车辆具备高级自动驾驶能力,促进自动驾驶规模商业化落地。








PDF版本将分享到199IT知识星球,扫描下面二维码即可!
更多阅读:
